In the current zeitgeist of Large Language Models (LLMs) and generative marvels, we are witnessing a bizarre inversion of the hierarchy of competence. We have algorithms capable of passing the Bar exam and drafting complex commercial contracts in seconds. Yet, we still lack a robot that can empty a dishwasher with the agility of a five-year-old child.
This discrepancy is not a programming „bug”; it is a profound structural reality known as the Moravec Paradox. For those of us navigating the intersection of Engineering, AI, and Law, understanding this paradox is not just an academic exercise—it is a prerequisite for realistic risk assessment and strategic planning.
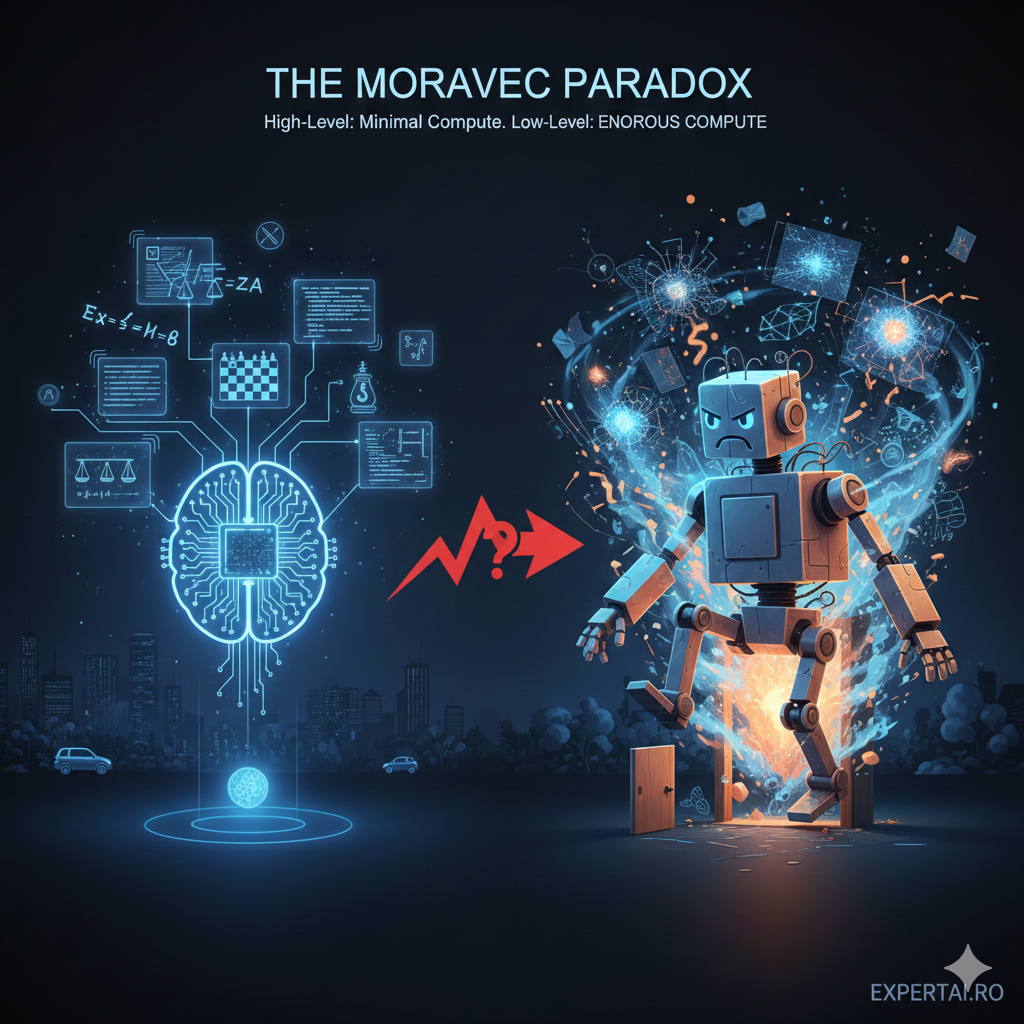
The Core Thesis: High-Level is Low-Cost
Coined in the 1980s by Hans Moravec, Rodney Brooks, and Marvin Minsky, the paradox posits a counterintuitive truth: High-level reasoning requires very little computation, but low-level sensorimotor skills require enormous computational resources.
The explanation lies in millions of years of evolutionary „R&D.” Our „abstract” abilities—mathematics, formal logic, stock market analysis—are recent add-ons in the history of our species, appearing only in the last few thousand years. Conversely, the processes of visual perception, physical balance, and object manipulation have been optimized by natural selection over hundreds of millions of years.
These sensorimotor functions are so highly optimized that they run „under the radar” of our conscious mind, leading us to the arrogant assumption that they are „easy.” In reality, replicating them artificially requires mapping a chaotic, unstructured physical world into data points—a task that consumes orders of magnitude more processing power than solving a differential equation.
Engineering Implications: The Physicality Bottleneck
From an engineering and architectural standpoint, Moravec’s Paradox forces us to abandon the dream of linear General AI.
- The Computational Cost of Reality: While an LLM operates within the clean, structured confines of tokens and vectors, a cyber-physical system (e.g., an autonomous delivery drone or a surgical robot) must contend with the „noise” of the real world. Every change in lighting, every gust of wind, and every uneven surface generates a flood of data that must be processed in real-time. In engineering, hardware—specifically sensors and actuators—remains the bottleneck of true autonomy.
- The Fragility of Edge Cases: Systems built on abstract logic fail gracefully when they encounter a typo. Systems built on sensorimotor loops fail catastrophically when they misinterpret a shadow as a solid object.
The Tech Law Perspective: Responsibility and „Banality”
In the realm of Tech Law and Privacy, the paradox creates a fascinating legal friction. Society tends to be more forgiving of a „high-level” AI error—such as a hallucination in a legal brief—than a „low-level” failure, such as an autonomous vehicle failing to recognize a pedestrian.
From a liability standpoint, the „banality” of sensorimotor tasks makes their failure appear as gross negligence rather than a technical limitation. As we move toward more robust AI regulations, we must distinguish between Inference Risk (the AI being wrong about a fact) and Operational Risk (the AI being wrong about a physical interaction). The latter requires a much more stringent „Privacy by Design” and „Safety by Design” framework, as the impact is immediate and irreversible.
Pragmatism vs. Hype: The Future of Work
The Moravec Paradox is a sobering reminder for those predicting the immediate total displacement of the human workforce. Ironically, „white-collar” tasks—data entry, basic legal research, and accounting—are computationally „cheap” and thus easier to automate.
The „blue-collar” professions that require complex physical navigation, fine motor skills, and contextual adaptability (electricians, specialized plumbers, emergency first responders) are the most resilient against the current AI wave. We are likely heading toward a future where „thinking” is a commodity, while „doing” remains a premium human capability.
Conclusion: A Lesson in Biological Humility
As we approach 2030, the success of AI engineering will not be measured by how well a model can mimic Shakespeare, but by how safely it can navigate a crowded room.
The Moravec Paradox serves as both a technical challenge and a memento of biological genius. For the experts at expertai.ro, the message is clear: do not mistake fluency for intelligence, and never underestimate the computational complexity of the „simple” act of walking through a door.
Under the EU AI Act, the Moravec Paradox transitions from a technical curiosity to a significant legal liability framework. Systems exhibiting „sensorimotor failures”—such as an autonomous warehouse robot misidentifying a human worker or a delivery drone failing to navigate a sudden physical obstacle—are primarily categorized under High-Risk AI systems (Annex III), particularly those integrated into critical infrastructure or safety components of machinery. Unlike the „hallucinations” of Generative AI, which are often governed by transparency obligations, sensorimotor failures trigger stringent Risk Management Systems (Article 9) and Human Oversight (Article 14) requirements. Legally, the paradox creates a „duty of care” challenge: because these systems operate in unstructured physical environments, the provider must demonstrate that the AI’s failure to perform a „banal” physical task was not the result of inadequate training data diversity or a failure in real-time sensor fusion. Consequently, under the proposed AI Liability Directive, the „presumption of causality” could significantly shift the burden of proof onto the developer, as a failure in basic physical navigation is increasingly viewed not as an unpredictable „edge case,” but as a foreseeable risk inherent in the computational limitations identified by Moravec decades ago.